Información adicional
| Kit | R503 MetalBot |
|---|---|
| Plataforma | mBlock |

En esta oportunidad construiremos un robot trio con brazo utilizando el ladrillo inteligente R8+, con dos motores, un servo motor, un led bicolor y un sensor ultrasónico, seguiremos los pasos del instructivo, generaremos el software mediante mBlock y lo veremos en acción.

Puede descargar el instructivo siguiendo este enlace
Puede descargar el programa ya armado para cargar al ladrillo inteligente R8+ desde este enlace
Esta actividad tiene como objetivo el aprendizaje del uso del ladrillo inteligente R8+ y la programación en mBlock la cual utilizaremos para darle comportamiento al modelo armado, cuando se detecte un objeto cercano por el sensor ultrasónico, el robot baje el brazo y capture el objeto que fue detectado, mueva el mismo dando media vuelta y alejándolo para finalmente liberarlo, el robot vuelve a repetir las acciones dando media vuelta y si no se detecta objeto alguno seguirá avanzando.
Una vez abierto mBlock vamos a cargar la extensión para el ladrillo inteligente R8+. Si no sabe o no recuerda como cargar la extensión, pruebe repasando los pasos del asistente siguiendo este enlace.
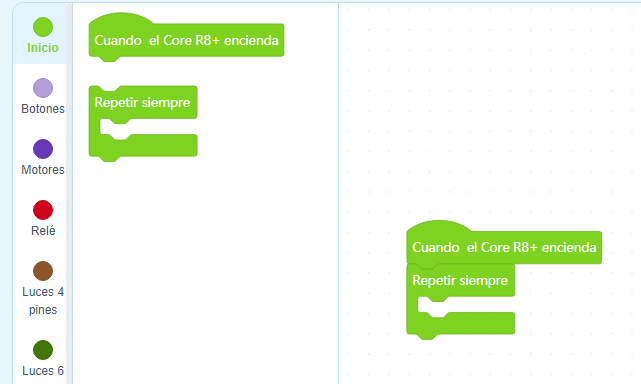
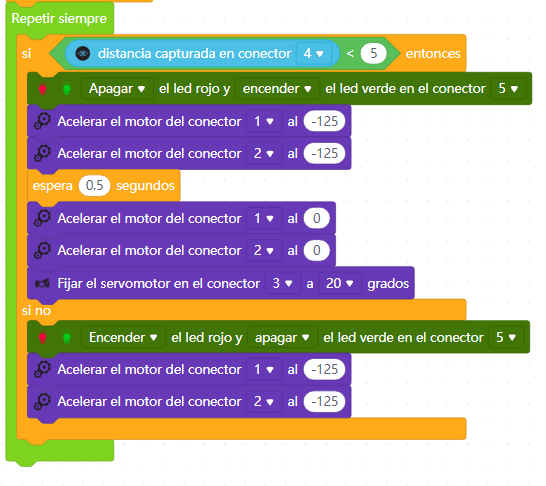
Luego de cargar la extensión comenzaremos colocando los bloques iniciales de arranque del ladrillo y el bucle principal del programa
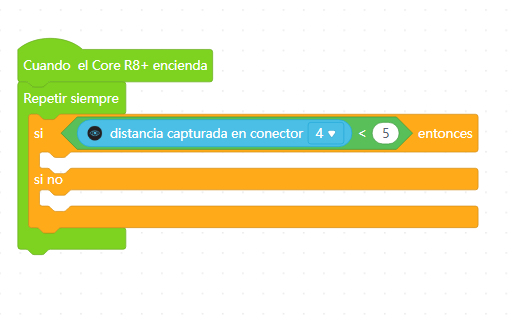
Colocaremos un bloque condicional SI-SI NO, dentro de las condiciones colocaremos una evaluación lógica menor a de números, en la parte izquierda colocaremos el bloque que nos devuelve la lectura del ultrasonido que conectaremos al Puerto 4, en la parte derecha colocaremos un 5.
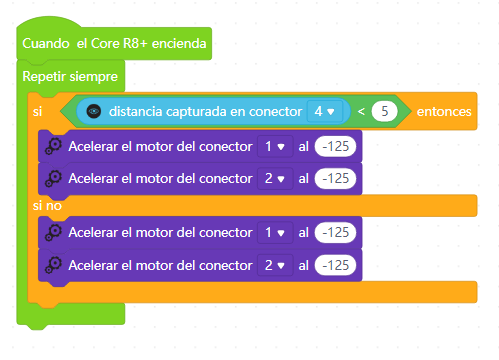
Dentro de cada sección colocaremos los bloques que nos servirán para accionar los motores con un valor de -125.
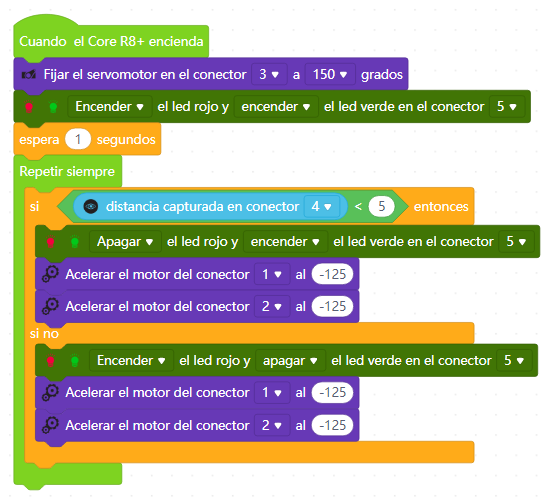
Colocaremos el bloque del led bicolor que cumple la función de indicarnos cuando está detectando un objeto o no. Lo conectaremos en el puerto 5. Colocaremos este bloque al iniciar el programa, cuando ingresa al SI y cuando ingresa al NO.

Colocaremos el bloque del servo motor que cumple la función de darle movimiento a nuestro brazo, lo conectaremos en el puerto 3 con un Angulo de 150 grados al inicio del programa esto hará que al iniciar el brazo del robot esté levantado. También agregaremos una pausa de un segundo.
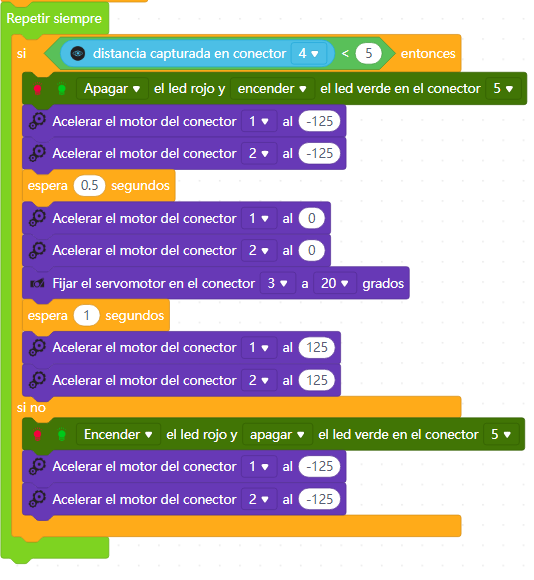
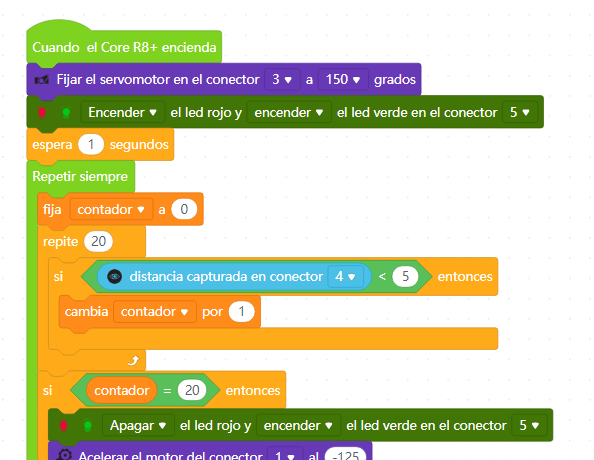
Luego colocaremos mas bloques al final del SI, una pausa de medio segundo, colocaremos la velocidad de los motores a cero e indicaremos al servo que se coloque a 20 grados.
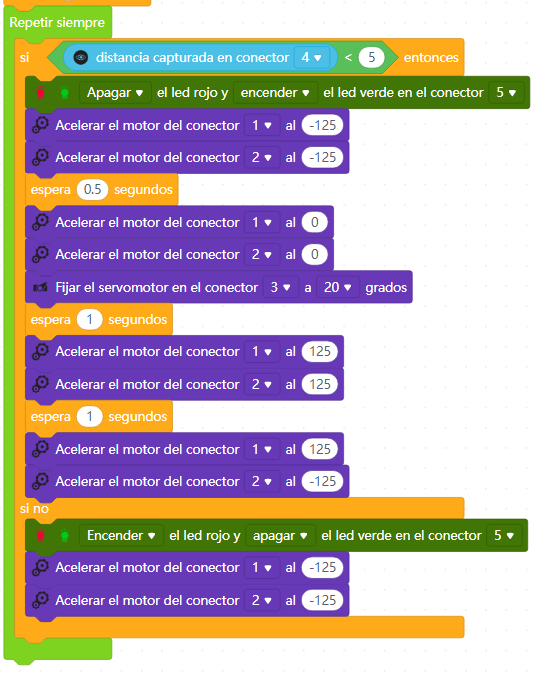
Colocaremos una pausa de un segundo y mas bloques de movimiento luego de la ultima instrucción SI, esta vez con valor de 125 positivo.
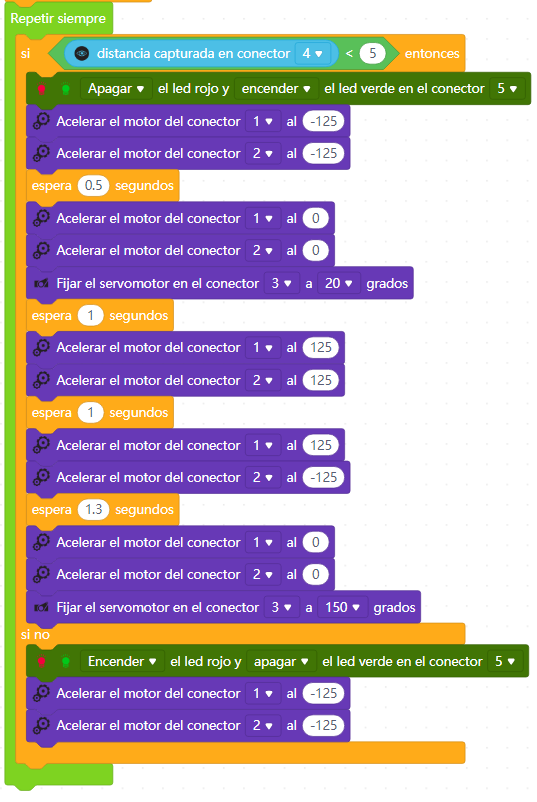
Ahora pondremos otra pausa de un segundo y dos bloques de movimiento después de la ultima pausa, cabe destacar que los motores están con dirección opuesta, es decir uno va hacia una dirección con velocidad NEGATIVA y otro la dirección opuesta con velocidad POSITIVA.
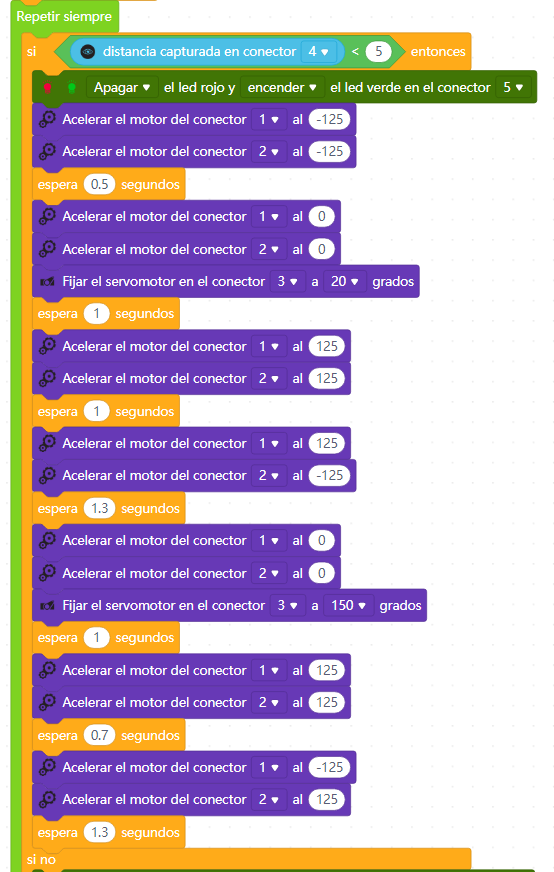
Seguimos sumando bloques del motor luego de una pausa de 1.3 segundos, apagaremos los motores y colocaremos el servo motor a 150 grados nuevamente.
Colocaremos otra pausa de un segundo y bloues de avance de los motores con valor de 150 al final de los bloques del SI.
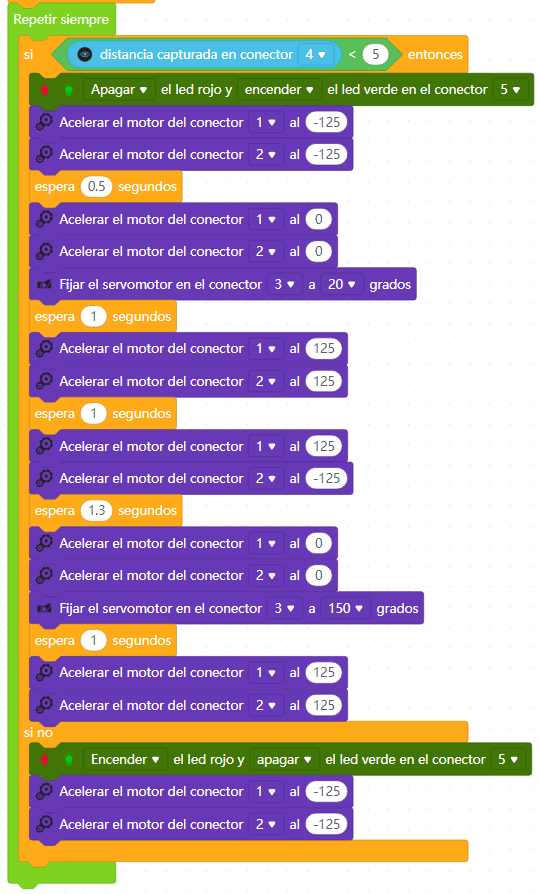
Finalmente colocamos una pausa de 0.7 segundos un avance con direcciones invertidas de los motores y una ultima pausa de 1.3 segundos al final de los bloques del SI.
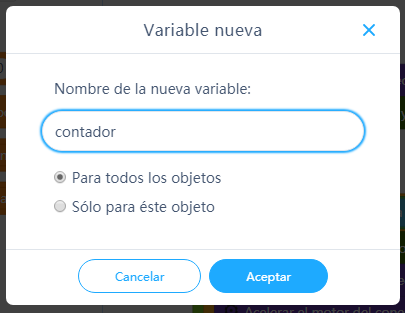
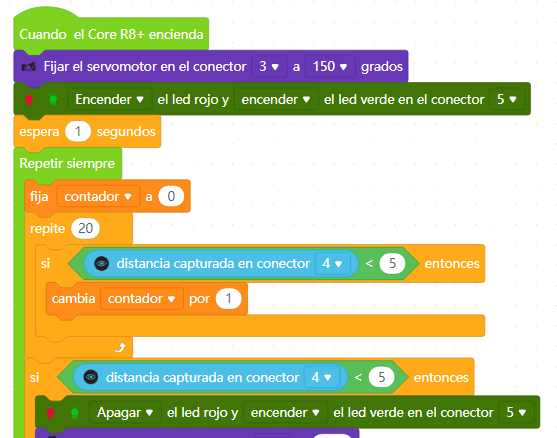
Si bien el robot ya funcionaria de acuerdo al objetivo de la actividad, hay ocasiones en las que el sensor ultrasónico no toma una buena lectura, por este motivo realizaremos la implementación una variable numérica nueva y de un bucle REPITE. A la variable la llamaremos contador.
A dicha variable la pondremos al inicio de para siempre fijada a cero y debajo de la misma pondremos el bucle REPITE con un valor de veinte.
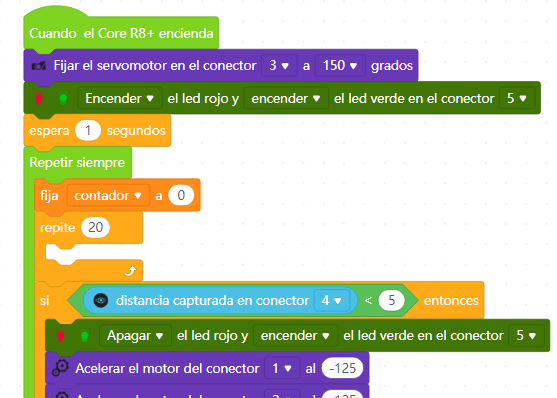
Pondremos un condicional SI y dentro de la evaluacion colocaremos lo mismo que esta dentro de la condicion del programa princial, es decir la evaluacion del valor devuelto por el sensor ultrasónico. Dentro de la condicion cambiaremos la variable contador por uno.
Para finalizar colocamos como condicion en el SI-SI NO del programa principal que se evalue si la variable contador es igual a veinte.
Con esto concluiremos la actividad, cargaremos el programa al ladrillo inteligente R8+ y veremos las acciones que programamos recientemente. Aquí tenemos un video de ejemplo de como debería verse el robot al finalizar la actividad.



Valoraciones
No hay valoraciones aún.