Información adicional
| Kit | R502, R503, R503 Agro, R503 Industria |
|---|---|
| Tiempo | 30 – 60 min |
| Actuador | Motor DC |
| Sensor | Infrarrojo – CNY70 |
| Tema | Física, Matemática, Tecnología |
| Edad | 7 a 9 años, 9 a 11 años, 11 a 13 años, + 13 años |

Utilizaremos el SENSOR INFRAROJO (IR) CNY70, para que un vehículo pueda detectar el borde de una mesa o una superficie oscura que absorba la luz.
En esta actividad construiremos un vehículo (QBot 2×2) en el que ubicaremos el Sensor IR CNY70 en la parte frontal del robot, de 5 a 10 mm de altura (con respecto a la mesa, tablero o piso) apuntando hacia abajo. Mientras el SENSOR IR esté emitiendo y recibiendo ,como reflejo, el mismo haz de luz que emitió, el robot avanzará hacia adelante con sus motores encendidos. Cuando el SENSOR IR no reciba el rebote de su propia luz, el Qbot 2×2 detendrá de inmediato los motores y quedará quieto.
En esta experiencia, el cambio de la superficie de reflejo de la luz infrarroja puede hacerse de dos maneras:

Es un sensor de corto alcance (5-10 mm), cuyo funcionamiento se basa en la reflexión de luz infrarroja. El mismo integra un emisor de luz y un receptor de Luz infrarroja, ambos apuntando en la misma dirección. Cuando la luz se dispersa o es absorbida por una superficie oscura, la salida del dispositivo, es de nivel lógico «1». Si por el contrario la luz se refleja sobre una superficie clara se produce un nivel lógico «0». . Este sistema es el que se emplea para distinguir entre blanco y negro en la conocida aplicación del robot seguidor de línea. Se puede conectar en cualquier salida que tenga un pin digital

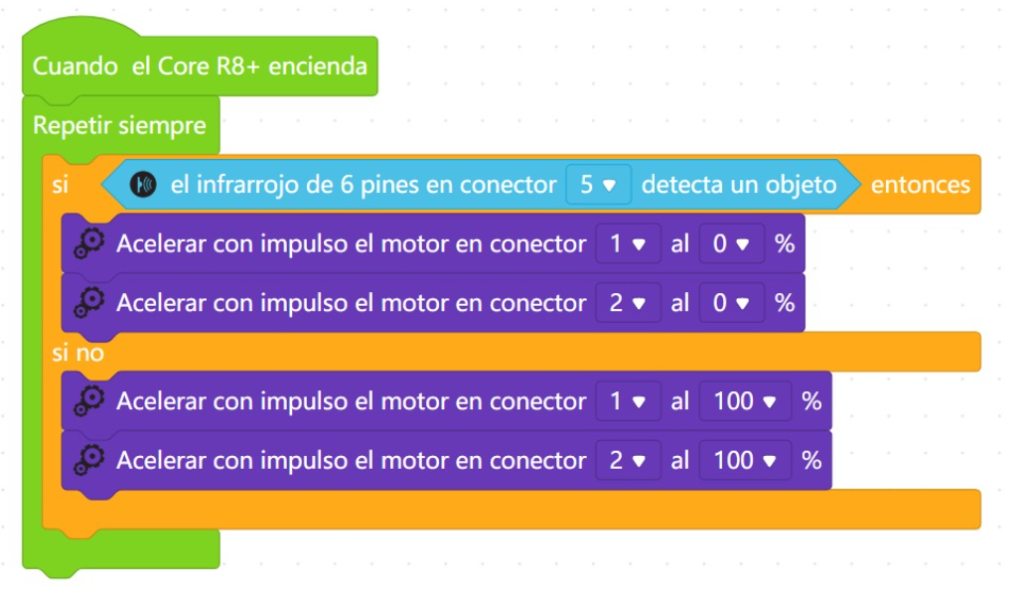
Conectar el Motor 1 a CON1 ( Pin Digital 11 y 12) del Ladrillo Inteligente «R8»
Conectar el Motor 2 a CON2 ( Pin Digital 6 y 8) del Ladrillo Inteligente «R8»
Conectar el Sensor de Infrarrojo IR a CON5 ( Pin Digital 9 y Analógico 0) del Ladrillo Inteligente «R8»
Comienzo del programa
Inicio del Bucle para siempre
Sensor IR envía un valor “0” o un valor “1”.
Si el valor del sensor infrarrojo es 0
Si el valor del sensor infrarrojo es 1
Se retorna al inicio del Bucle para siempre

Descarga del programa (Link)
*Atención: no abrir cada archivo por separado. Clickar en el icono «DESCARGAR» que se encuentra arriba a la derecha.
Utilizaremos los siguientes bloques:
Utilice una mesa rectangular o cuadrada y modifique el programa para que el Robot, luego de alcanzar el borde de la mesa, realice la siguiente secuencia, :
| Kit | R502, R503, R503 Agro, R503 Industria |
|---|---|
| Tiempo | 30 – 60 min |
| Actuador | Motor DC |
| Sensor | Infrarrojo – CNY70 |
| Tema | Física, Matemática, Tecnología |
| Edad | 7 a 9 años, 9 a 11 años, 11 a 13 años, + 13 años |



Valoraciones
No hay valoraciones aún.